
Sysmac kontrolör – NJ5 Serisi
NJ5 serisi lojik sırası ve hareket için makine kontrolörüdür ve robotlar ve veri tabanı bağlantısı gibi gelişmiş fonksiyonlar için CPU seçenekleri içerir.
- En hızlı döngü süresi: 500 µs
- Eksen sayısı: 64, 32, 16
- Senkronize hareket merkezi
- Fonksiyonlar: Lojik sırası, Hareket, CNC, Robotlar, Veri tabanı bağlantısı, SECS/GEM ve OPC-UA
- V2.0’daki doğrudan veri tabanı bağlantısı, kayıtlı prosedür aramaları ve güvenli haberleşme fonksiyonlarıyla geliştirildi
- Doğrudan veri tabanı bağlantısı: Microsoft SQL, Oracle, IBM DB2, MySQL, Firebird ve PostgreSQL sunucusu için SQL Client
- Delta, SCARA ve Kartezyen robot kontrolü
- CNC fonksiyonu: XY kesme, frezeleme, tornalama işlemlerinin yanı sıra dağıtma, bükme, taşlama ve biçimlendirme makineleri gibi tüm sıralı uygulamalar için uygundur
- Multi tasking
- Dahili EtherCAT ve EtherNet/IP portları
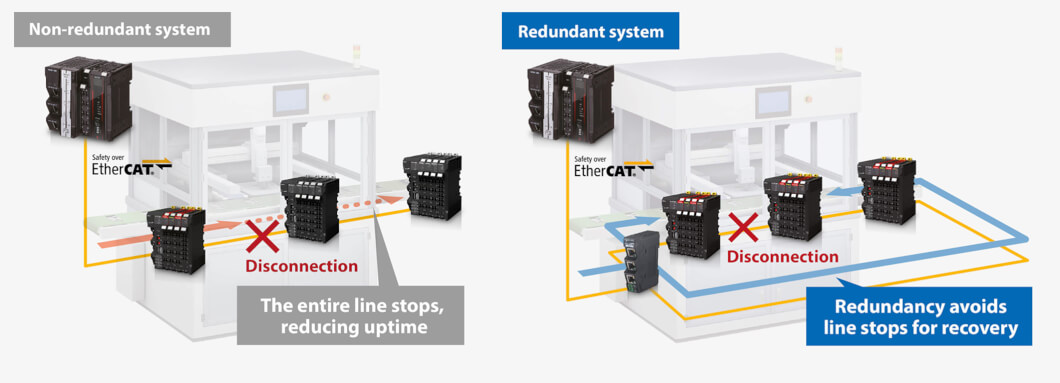
- Kablo bozulması veya cihaz hatası durumunda haberleşme ve kontrolü devam ettirmek için EtherCAT Halka topolojisi desteklenir.
EtherCAT Redundancy
Yedekleme, duruş süresini en aza indirir
EtherCAT ağının bir parçasının bağlantısı kesilse bile Kablo Yedekleme, sürekli bağlantı sağlar.
Bu fonksiyon, makinelerde ve bir kontrolörün hem makine kontrolü hem de emniyet kontrolü sağladığı üretim hattında duraksamaya neden olmadan kesik bağlantı sorununu çözmenize izin verir.
Yazılım
Sysmac Studio – Entegre Geliştirme Ortamı
- Lojik sırası, hareket, emniyet, robotlar, görsel denetim, HMI ve Veritabanı bağlantısı için tek bir araç
- IEC 61131-3 açık standardı
- Mühendislik süresini ve makinenin kullanılabilirliğini optimize etmek için Sysmac Kütüphanesi
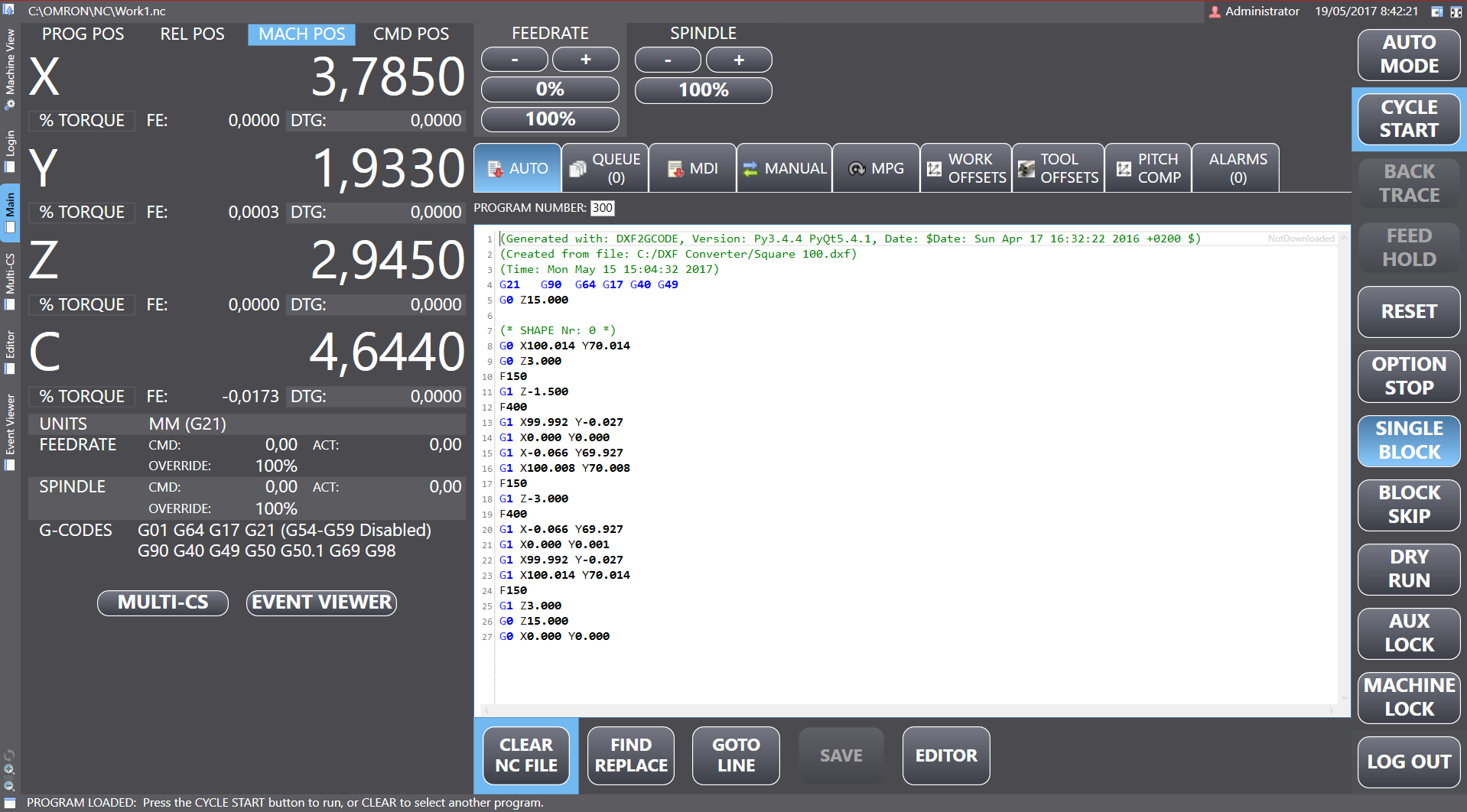
- G Kodu Dosya Editörü
- Yürütme monitörü Aktif G/M kod ekranı
- Komut terminali
- Hareket ettirme, ana pozisyona döndürme
- Kişiselleştirilebilir yazılım, kullanıcının fonksiyon eklemesine imkan tanır (CNC operatörü SDK sürümü gerektirir)
OMRON Sysmac Platform with CNC
Our Sysmac Platform now integrates the complete machine processes and CNC in one machine controller. It improves production efficiency, enables complex motion trajectories.








{kind=link}